
- Computer Vision Sub-Lead at Mujin, Inc.
- www.kentaro.wada (at) gmail.com
- Tokyo, Japan
Kentaro Wada was born in Japan in 1994. He received his B.Sc. (2016) and M.Sc. (2018) from Mechanical Engineering and Computer Science Department in The University of Tokyo (UTokyo). In his research at UTokyo, he was working on learning-based scene understanding for robotic manipulation at JSK Laboratory supervised by Prof. Masayuki Inaba and Prof. Kei Okada. He recieved his PhD in 2022, at Dyson Robotics Laboratory in Imperial College London supervised by Prof. Andrew Davison. During his PhD, he worked on object-level semantic scene understanding, a general scene representation useful for robotic manipulation, and showed several novel capabilities of robots. He joined Mujin, Inc. in 2022 as a computer vision engineer, and is working on advancing robots' capabilities in the real-world environment.
Updates
- Jul 2023: Got a new position of Computer Vision Sub-Lead at Mujin Inc.
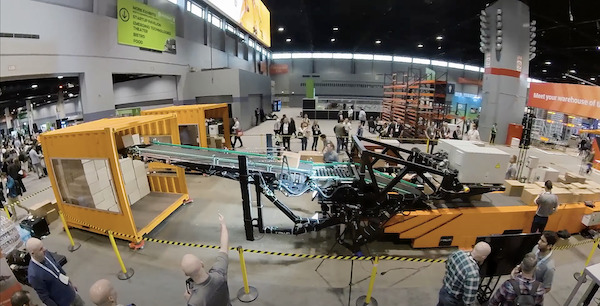
- Mar 2023: Exhibited a devanning robot at Promat 2023 in Chicago, US.
- Jul 2022: Joined Mujin, Inc. as a computer vision engineer.
- May 2022: Presented two papers at ICRA 2022 in Philadelphia, US.
- Mar 2022: Passed the PhD viva.
- Jun 2020: Presented a paper at CVPR 2020.
- May 2019: Presented two papers at ICRA 2019 in Montreal, Canada.
- Feb 2019: Participated RVSS2019 summer school in Canberra, Australia.
- Oct 2018: Joined Dyson Robotics Laboratory to start PhD program.
Last Update: 2023-09-22
Selected Projects

- Robotic Manipulation in Clutter with Object-Level Semantic Mapping
- Kentaro Wada
- PhD Thesis, Imperial College London, Department of Computing, 2022

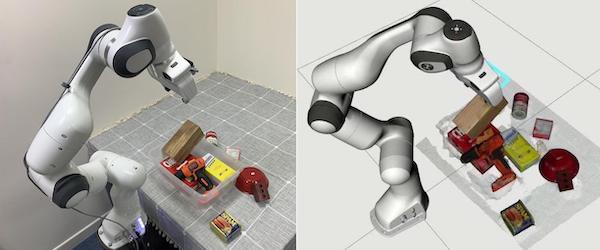
- ReorientBot: Learning Object Reorientation for Specific-Posed Placement
- Kentaro Wada, Stephen James, Andrew J. Davison
- IEEE International Conference on Robotics and Automation (ICRA), 2022
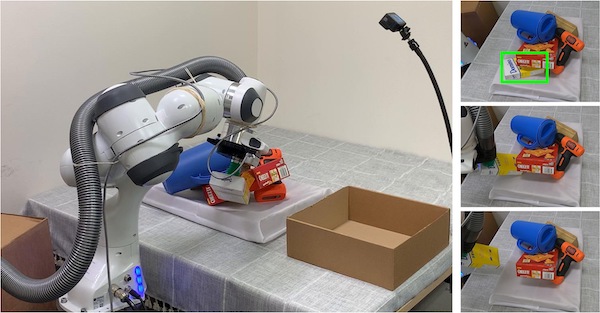
- SafePicking: Learning Safe Object Extraction via Object-Level Mapping
- Kentaro Wada, Stephen James, Andrew J. Davison
- IEEE International Conference on Robotics and Automation (ICRA), 2022
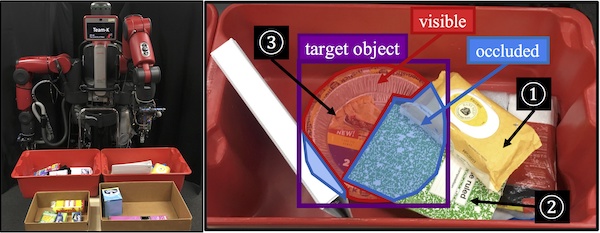
- Instance Segmentation of Visible and Occluded Regions for Finding and Picking Target from a Pile of Objects
- Kentaro Wada, Shingo Kitagawa, Kei Okada, Masayuki Inaba
- IEEE/RSJ International Conference on Robotics and Intelligent Systems (IROS), 2018
- (Won IEEE RAS JJC Young Award as one of the 5 Japanese students.)